One of the ironies of radiopharmaceuticals is that the creation of life-saving isotopes creates real risk for the operators carrying out their production. Naturally, barriers are in place to protect the people doing this work.
The most effective method of protection is the physical separation of human beings from radioactive materials with thick walls of concrete, steel and leaded glass. Manipulators installed through these walls allow technicians to safely perform the necessary tasks needed for production as well as research for future game-changing breakthroughs.
When the need arises, manipulators can get big in a hurry
For radiopharmaceutical applications, manipulators are typically involved with drawing the correct dose of medicine. Pharmacists can use the manipulator to fill containers, making sure the dosage is correct and adjusting levels as needed before packaging commences.
There are several styles of manipulators, but all have the same basic function. To be the hands (and wrists and fingers) inside the hot cell for the human operator outside. Manipulators can perform tasks as basic as lifting objects out of transfer containers to operations as complex as weighing tiny amounts of test material or filling and capping a vial.

Expert manipulator users have even been known to have a firm but deft enough "hand" to light a match.
Manipulators are simple in concept. The operator, working outside the hot cell, holds a handle on the command arm in her hand, and moves her arm, wrist and hand as if she was working inside the danger-zone, literally handling the material. The remote arm mimics her motion, giving her access to the entire hot cell work area. As she squeezes the command arm handle, the remote arm tongs compress with identical distance and force. Therefore, virtually any task the operator could complete with her own hands, she can accomplish with a manipulator.
Virtually all manipulators operate similarly with basic motions: back and forth, in and out and up and down (or telescoping motion).
A to Z of manipulators
Ball manipulators (or grippers) are common in radiopharmaceutical applications, as are telemanipulators, sometimes referred to as Master-Slave Manipulators or more recently, Command-Remote Manipulators (CRM). CRMs were first developed in the late 1940s to service the budding nuclear research industry. Companies such as Central Research Laboratories and TruMotion in the US along with LaCalhene and Wälischmiller in Europe service the global demand for manipulators.
Hot cells, where manipulators are used, come in a variety of sizes. Many radiopharmaceutical facilities may have only one or two manipulators working in a 1m3 (35ft3) cell. Contrast this with Idaho National Laboratory which has hot cell areas with 16 large manipulators on just one wall.
Manipulator size varies along with cell size. Ball manipulators might be 1000 mm long and can lift a few kilograms. Radiopharmaceutical companies use small, one-piece manipulators (such as a CRL model G-LDR) which has a reach of 650 mm and a lift capacity of around 5 kg. However, when the need arises, manipulators can get big in a hurry.
Electronics don’t thrive in high-radiation environments
According to James Mahaffey in his book Atomic Adventures, in the 1950s, the US Government built hot cells to work on nuclear aircraft. These cells had "two heavy-duty Model D Central Research Laboratories Manipulators" and "A bridge manipulator, a muscular robotic arm (General Mills Model E2) capable of delicately lifting a jet engine."
Ball manipulators are relatively inexpensive to operate and maintain. They are installed straight through the hot cell wall, generally below the viewing window. This manipulator style has few moving parts, limiting the need for replacement spares.
On the other hand, the area covered by a ball manipulator is limited and they may not be able to perform all the complex motions that a CRM is able to produce.
In contrast with ball manipulators, CRMs have wrist joints that can rotate 180° in several directions, allowing the remote arm tongs to function like the fingers of a hand. This is a lot of motion; picture the movement the fingers, hands and arms need to accomplish to cut a piece of food with a knife and fork and move it to the mouth; a CRM can manage all of this.
The size range for CRMs is considerable and is based on the area they need to cover (i.e. cell size) and how much weight they need to be able to lift. For radiopharmaceutical applications, smaller manipulators are typical, with a lift capacity of less than 10 kg. For nuclear environments, the largest CRMs can lift close to 45 kg.

One-piece telemanipulator
It is important to note, operator strength is a critical variable. Standard CRMs provide reach and dexterity, but not lift. The strength of the operator will be needed to lift objects inside the hot cell.
If the operator cannot lift 50 kg with one hand, the manipulator will not be able to either. Strength is also limited as the remote arm is extended away from a straight vertical position.
As a human arm moving away from the body loses strength, a manipulator remote arm does the same.
CRMs need to cover the entire working area of the hot cell. Sometimes critical tasks are performed at the end of the manipulators reach. This can cause issues for the operator; imagine having to perform a complex task with your arm extended for a long period of time, tiring and uncomfortable.
To combat this, many manipulators have an indexing feature. Most common in the up-and-down (or telescope) motion, indexing allows the operator to extend the manipulator's remote arm in relation to the command arm.
For example, the operator may lower the remote arm towards the floor. He then sets the index and raises the command arm back up to a more comfortable level. The remote arm remains near the floor to perform the tasks while the operator has his hands in a good position ergonomically. Advanced manipulators offer electrical indexing, lowering operator burden even further.
Logistics
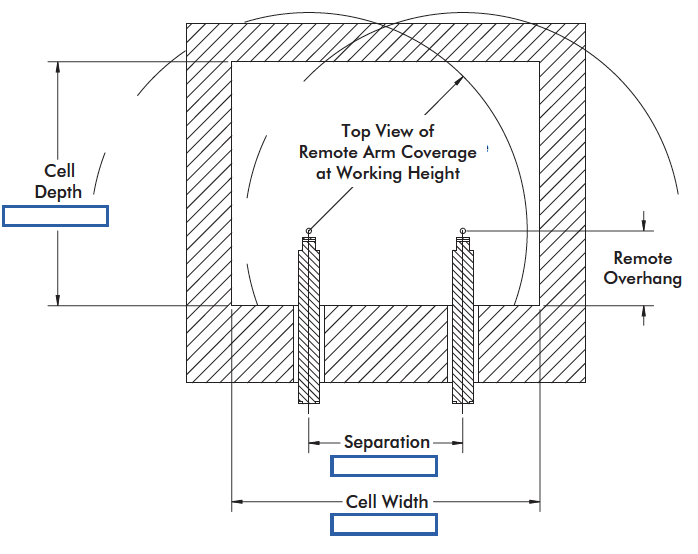
When it comes time to consider how to layout a manipulator in a hot cell, there are several important considerations to factor in. A manipulator needs to be large enough to cover the space available, but no larger.
Manipulator arms have a minimum length (or collapse length); if you have a manipulator that is too large, there will be areas of your hot cell you cannot reach. Wall thickness is critical; in addition to providing protection from radioactive environments, the wall needs to be able to support the weight of the manipulators.
Remotely controlled manipulators have fuller range of motion
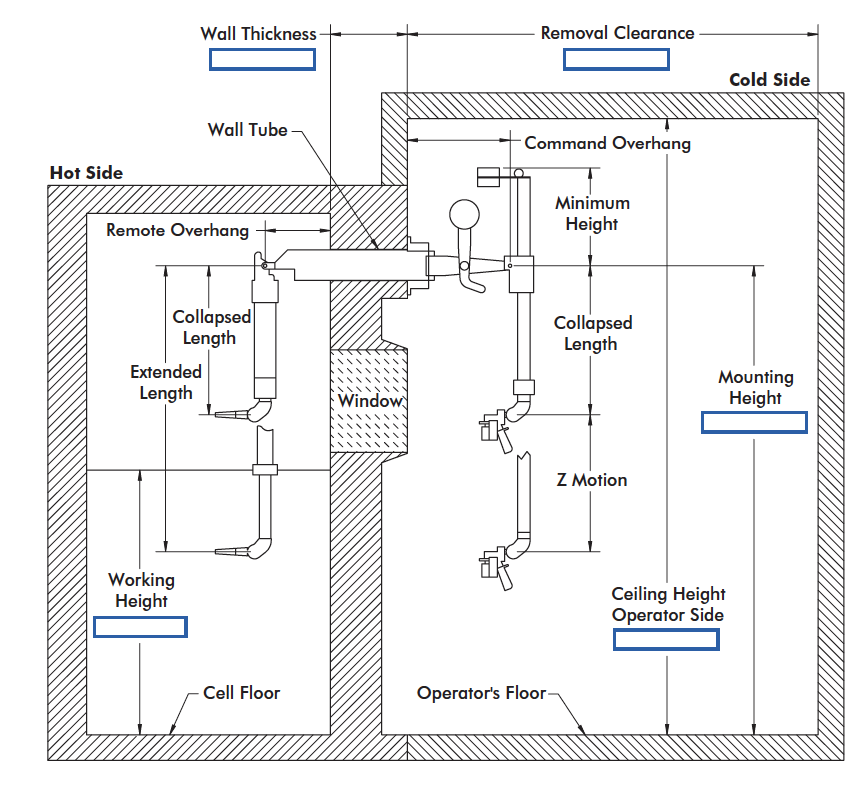
Installation space is an often-overlooked factor. One-piece manipulators (most common in radio pharma applications) need to have the remote arm fully extended for installation and maintenance. A space greater than the remote arm length, plus the length of the centre tube that goes through the wall will be needed for installation.
It is best to determine minimum and maximum remote arm lengths for a manipulator early on in the design cycle.
For decades, manipulator technology has been somewhat stagnant. Certainly, improvements have been made to improve reliability, performance and operator comfort; however, the base technology is essentially the same as it was in the 1950s. One big reason for this is the fact that electronics don't thrive in high-radiation environments.
Additionally, many of the tasks manipulators are called upon to perform aren't repetitious enough for robotics. However, change is on the horizon. Several companies have released products to operate the command side of a manipulator electronically (the remote arm still functions mechanically).
This has many advantages. Remotely controlled manipulators have a fuller range of motion (for example, they can move 360° around, which a standard CRM cannot do). In addition, these manipulators do not rely on operator strength for lifting capacity. Another advantage is the variety of control methods available to operators based on their individual preferences and capabilities.
It is not hard to envision a future where operators will be able to operate multiple remote arms from anywhere in the world.
Manipulators of all varieties will continue to play a critical role in both the radiopharmaceutical and nuclear industries for many years to come.
It is likely, however, that manipulator technology will advance at a much greater rate than seen in the past. But the main role of letting technicians and scientists safely handle radioactive materials will remain the purview of manipulators for decades to come.
N.B. This article is featured in the October 2020 issue of Cleanroom Technology. The latest digital edition is available online.